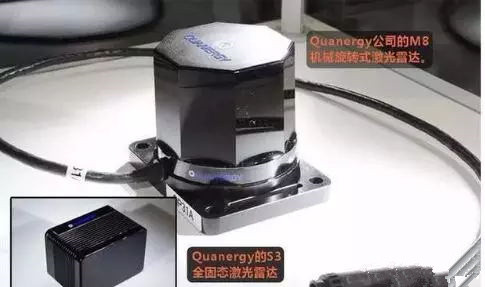
由于内部结构有所差别,两种激光雷达的体积大小也不尽相同。机械激光雷达体积较大、价格昂贵、测量精度相对较高,一般置于汽车外部。固态激光雷达尺寸较小、性价比较高、测量精度相对低一些,但可隐藏于汽车车体内,不会破坏外形美观。
根据线束数量的多少,激光雷达又可分为单线束激光雷达与多线束激光雷达。
顾名思义,单线束激光雷达扫描一次只产生一条扫描线, 其所获得的数据为2D数据,因此无法区别有关目标物体的3D信息。不过, 由于单线束激光雷达具有测量速度快、数据处理量少等特点, 多被应用于安全防护、地形测绘等领域。
传统的激光雷达扫描视场非常小,如果想360度的观察周围,怎么办?最自然的办法就是多搞几束激光,线数越多覆盖的角度越大。

多线束激光雷达扫描一次可产生多条扫描线,目前市场上多线束产品包括4线束、8线束、16线束、32线束、64线束等,其细分可分为2.5D激光雷达及3D激光雷达。2.5D激光雷达与3D激光雷达最大的区别在于激光雷达垂直视野的范围,前者垂直视野范围一般不超过10°,而后者可达到30°甚至40°以上,这也就导致两者对于激光雷达在汽车上的安装位置要求有所不同。
测量距离、测量精度、测量速率、角度分辨率是决定三维激光雷达性能的几个重要指标。

例如,在无人驾驶汽车这个应用领域,对激光雷达的探测距离是有要求的。比如说高速公路上要能够检测到前方车辆,还有在十字路口上,要能够观测马路对面的汽车。
有趣的是,精度不是越高越好。激光雷达获取的的数据可以进行障碍物识别、动态物体检测及定位,如果精度太差就无法达到以上目的;但是,精度太好也有问题,高精度对激光雷达的硬件提出很大的要求,计算量会非常大,成本也会非常高。所以精度应该是适中就好。
还有一点不能忽视的是角分辨率,角分辨率决定打出去后的两个激光点之间的距离。单点测距精度达到后,如果打到物体表面两点间距离(点位)太远,测距精度也就失去意义了。
机遇
激光雷达在智能机器生态系统中有很多机遇。与使用二维图像相比,点云能够更容易的被计算机使用,用于构建物理环境的三维形象——二维图像是人脑最容易理解的数据,而对于计算机来说,点云是最容易理解的。
二维激光雷达扫描器可在户外使用,并专为移动、低功耗应用而设计。它只用了竞争对手近四分之一的成本,这将给这类传感器带来全新的应用(我们在很多其他类型的传感器中已经看到过这样的现象)。 二维激光雷达也可以被搭载到另一个旋转的元件上以产生环境中完整的三维点云。

其他公司正在寻求降低系统成本的其他策略,例如Quanergy的固态激光雷达。该系统大体与上文已介绍的系统相同,然而,与使用旋转光学器件来移动光束不同的是,它们使用 “相控阵列光学系统”来引导激光脉冲的方向,它可以在某一方向上释放一个激光脉冲,而让下一个脉冲(1微秒之后)瞄准视野中的其它地方。
它能够实时关注视野范围内看似移动的物体,这是对人类驾驶员的模仿——后者能及时注意到即将进入汽车所行驶的道路的障碍物。Quanergy系统被设计为能在没有机械移动的情况下做到这一点,并且每秒采样大约100万个数据点——这与64线旋转激光雷达的速度相当,却能显著降低成本。它另一个优势是更容易被集成在反光镜和保险杠等其他汽车部件上。
另外,更大和功率更高的系统也正在开发中,它可以从在3万英尺高度飞行的飞机上对地面成像,其分辨率足以能够看到地面上的车辆。虽然这些系统的市场需求更小,且成本更高,但其发展将继续降低传感器技术的整体成本。
挑战
1、材质
由于激光雷达基于对激光脉冲返回传感器所需时间的测量,因此高反射率的表面会带来问题。大多数材料从微观水平上看表面粗糙,并且向所有方向散射光;这类散射光的一小部分返回到传感器,并且足以产生距离数据。然而,如果表面反射率非常高,光就会向远离传感器的方向散射,那么这一区域的点云就会不完整。
2、环境
空气中的环境也可以对激光雷达读数造成影响。记录显示,大雾和大雨会减弱发射的激光脉冲而对激光雷达造成影响。为了解决这些问题,较大功率的激光器投入使用,但它对于较小的、移动或对功率敏感的应用来说并不是一个好的解决方案。
3、行驶速度
激光雷达系统面临的另一个挑战是旋转时的刷新率相对较慢。系统的刷新速率受复杂的光学器件旋转速度的限制。激光雷达系统最快的旋转速率大约是10Hz,这限制了数据流的刷新速率。当传感器旋转时,以60英里/小时行驶的汽车在1/10秒内行进8.8英尺,因此传感器对于在汽车驶过期间在这8.8英尺内发生的变化基本上是看不清的。更重要的是,激光雷达覆盖的范围(在完美条件下)为100-120米,这对于以60英里/小时行驶的汽车来说仅相当于不到4.5秒的行驶时间。
4、成本
也许对于激光雷达来说,高昂的设备成本是它需要克服的最大挑战。尽管自该技术得到应用以来其成本已大幅降低,但仍然是它被大范围采用的一个重要障碍。对于主流汽车工业来说,一个价值2万美元的传感器将无法被市场接受。伊隆·马斯克说:“我不认为它对于汽车的发展是有意义的,我认为它不是必须的。”
5、属性识别
虽然我们将激光雷达视为计算机视觉的一个组件,但点云却是完全基于几何呈现的。相反,人眼除了形状之外还能识别物体的其他物理属性,比如颜色和纹理。现在的激光雷达系统不能区分纸袋和岩石之间的差别,而这本应是传感器理解和试图避开障碍物时考虑的因素。
6、黑客攻击
激光雷达发出去的激光本身是没有编码的。所以接收器自己本身是没办法识别到底这束光线是它隔壁发射器发射出去的还是干扰信号。黑客攻击指的是采取模拟车辆、行人的信号,反馈给激光雷达造成周围存在障碍物假象的攻击手法。最终会导致汽车被强制减速或者刹车。
对激光雷达厂商而言,可以从两个角度去抵御黑客的攻击:如提高激光发射频率,高速激光发射频率在几个微秒,黑客的模拟信号就很难选择什么时候去发射干扰信号为接收器接收。另外,通过算法做一些错误判断,参考之前几频数据过滤掉干扰数据。

激光雷达只是用于给计算机提供物理环境数据的众多传感器之一,但是生成的数据是计算机最容易理解的,并且它也将变得更便宜。Velodyne销售和市场总监Wolfgang Juchmann称,激光雷达的成本在过去7年里下降了10倍。 得益于成本的降低,我们将不断看到新的潜在应用领域。
记者近日从西安理工大学获悉,该校激光雷达科研团队在斜程能见度测量技术上取得突破。他们提出了一种激光雷达结合辐射传输模式的方法,突破了目前的斜程能见度测量技术瓶颈,实现了精确测量。相关成果刊发在《光学学......
美国众议院中国事务特别委员会的议员敦促拜登政府调查中国激光雷达行业,并决定将哪些公司列入政府限制实体清单。激光雷达技术是一种遥感技术,被广泛应用于自主系统和机器人技术,包括无人机和自动驾驶汽车。立法者......
北京大学电子学院王兴军教授课题组-常林研究员课题组在两年攻关的基础上,研制出一种全新的硅基片上多通道混沌光源,提出了一种基于混沌光梳的并行激光雷达架构,攻克了激光雷达抗干扰和高精度并行探测这两个世界性......
北京大学电子学院王兴军教授课题组-常林研究员课题组在两年攻关的基础上,研制出一种全新的硅基片上多通道混沌光源,提出了一种基于混沌光梳的并行激光雷达架构,攻克了激光雷达抗干扰和高精度并行探测这两个世界性......
继芯片之后,激光雷达成为汽车产业链的又一热门词汇。2月6日和7日,激光雷达企业速腾聚创先后对外宣布,获得一汽丰田和赛力斯量产订单。这是国产激光雷达首次进入以严格、精细著称的丰田供应链体系。此前,头部激......
本周,一家新的激光雷达巨头正式诞生。当地时间2月13日,激光雷达制造商Ouster和Velodyne表示,双方已经成功完成了“对等合并”(mergerofequals),此次合并于2月10日生效,公司......
全球知名市场研究与战略咨询公司YoleIntelligence近期发布了《2022年汽车与工业领域激光雷达报告》。报告称,中国在全球汽车激光雷达市场中处于领先地位,来自中国的供应商成为这一领域的佼佼者......
从中国科学技术大学获悉,该校地球和空间科学学院教授薛向辉团队在相干测风激光雷达系统研制方面取得重大突破,首次实现空间分辨率3米、时间分辨率0.1秒的风场探测。据悉,这是迄今为止有报道的全球最高精度的风......
美国激光雷达公司来特斯拉挖宝了!4月21日周三,由于从特斯拉(TSLA.US)和英特尔(INTC.US)分别挖角到高管,美国激光雷达公司LuminarTechnologies(LAZR.us)股价盘中......
中国科学院上海光学精密机械研究所在用于海洋后向散射和衰减垂直剖面参数观测的双波长海洋激光雷达研究中取得进展。研究团队研制成功配备了486nm蓝光波段激光的雷达设备,可满足同时兼容近岸水体和大洋水体的探......