III. 工作原理
在讨论传感器架构之前,需要描述一下像素级自适应背景提取算法。我们考虑成像传感器的一个像素给一个特定场景点编码的情况。该像素以帧速率fps采集光强,并将其转换成电压VS(nT),其中T = 1/fps是像素传感器采样时间,整数n 表示帧个数。在传感器工作过程中,像素采集的光强呈动态变化,变化速率取决于场景内运动类型或环境光的变化。通过监视信号动态变化和振幅,每个像素需要检查场景中是否发生潜在异常。为此,必须从现有图像(Fi)提取背景(B),然后比较最终差值与正确的阈值(TH):

达到阈值的像素被标记为热像素,即在场景中检测到一个潜在的报警;未达到阈值的像素被识别为冷像素。考虑到背景易于变化,根据实际应用情况,选用复杂程度不同的模型:
● 帧差:假定背景值等于过去图像值(B = Fi-1)。这是一个简单易懂的方法,不过不是非常可靠。事实上,帧差对阈值(TH)、帧速率和物体速度非常敏感:

● 简单移动平均法:考虑到在若干个帧内的背景变化。这种方法需要n个帧缓冲器,但是占用非常多的存储容量和运算性能:
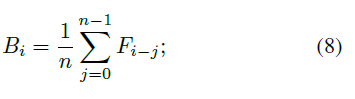
● 指数移动平均法: 该方法需要一个无限脉冲响应滤波器,应用了指数降低加权系数(0 < a < 1)概念:

该方法的主要优点是,不需要增加存储器,通过改变学习速率值a,即可微调滤波器。
考虑到上述方法的硬件实现问题和稳健性,我们利用指数移动平均法和两个电压阈值而非参考文献(6)的一个阈压建立了一个背景模型。阈压定义了信号可以安全变化(冷像素)的电压范围,超过这个安全范围(高于最高阈压或低于最低阈压),信号被视为异常(热像素),可能会触发一次报警。
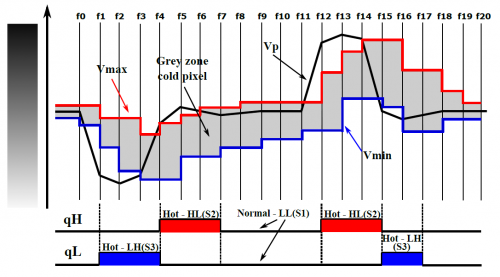
图4:在像素级执行背景动态提取算法
图4所示是背景提取算法的工作原理。该示例是一个单像素在20帧期间的工作情况。黑色曲线表示像素获取的信号电压VS,红线(Vmax)和蓝线(Vmin)波形是界定灰色区上下边界的两个阈压值的集合,在灰色区域内,信号可以自由变化,不会出现任何报警。信号电压VS经低通滤波后生成信号,每个滤波器在两个时间常量(tH < tL)之间开关操作,具体情况取决于下面条件:
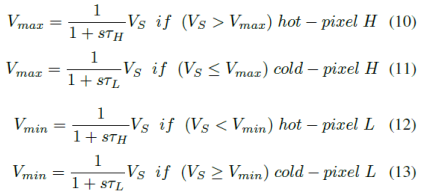
其中,等式(10)和(12)分别表示Vmax和Vmin的热像素条件,而等式(11)和(13)则表示冷像素条件。两个阈值的行为界定了一个根据信号动态在一段时间内变化的灰色区域,灰色区域代表VS未发现异常条件的运动的电压范围,例如,如果VS突然从亮变暗,越过灰色区域上边界(Vmax),则生成一个热像素。
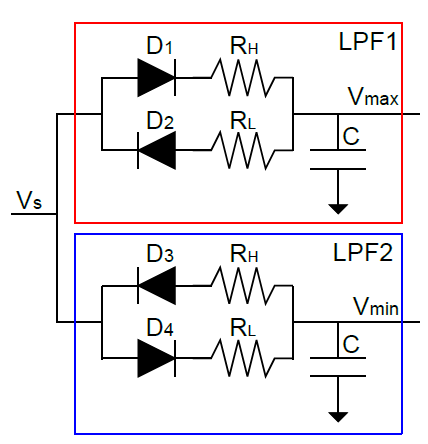
图5:两个一阶低通滤波器生成图4中的两个阈压。